feat: 新增子分类功能,美化profile
This commit is contained in:
610
src/content/posts/Java/集合/HashMap原理.md
Normal file
610
src/content/posts/Java/集合/HashMap原理.md
Normal file
@@ -0,0 +1,610 @@
|
||||
---
|
||||
title: HashMap原理
|
||||
published: 2025-07-18
|
||||
description: ''
|
||||
image: ''
|
||||
tags: [HashMap,Java]
|
||||
category: 'Java > 集合框架'
|
||||
draft: false
|
||||
lang: ''
|
||||
---
|
||||
|
||||
|
||||
# 说说HashMap的原理
|
||||
|
||||
HashMap是基于哈希表的数据结构,用于存储键值对。
|
||||
核心是将键的哈希值映射到数组索引位置,通过数组+链表+红黑树来解决哈希冲突。
|
||||
|
||||
HashMap使用键的hashCode()方法计算哈希值,通过`(n-1) &hash`确定元素在数组中的存储位置。
|
||||
|
||||
哈希值是经过一定的扰动处理的,防止哈希值分布不均,从而减少冲突,
|
||||
|
||||
HashMap的默认初始容量为16,负载因子为0.75,也就是说,当存储的元素数量超过16 * 0.75 = 12个的时候,HashMap会触发扩容操作,容量x2并重新分配元素位置,这种扩容是比较耗时的操作,频繁扩容会影响性能。
|
||||
|
||||
# 通过源码深入了解HashMap
|
||||
|
||||
```java
|
||||
// 默认初始容量 - 必须是 2 的幂次方。
|
||||
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4; // 即 16
|
||||
|
||||
// 最大容量,如果构造函数中通过参数隐式指定了更高的值,则使用此最大容量。
|
||||
// 必须是小于等于 1 << 30 的 2 的幂次方。
|
||||
// 由于你可以随时指定非常大(甚至超过了1亿)的值,为了防止内存溢出或数组长度无效,HashMap内部通过MAXIMUM_CAPACITY做了一个“保险”,来确保容量不会超过某个安全极限。
|
||||
static final int MAXIMUM_CAPACITY = 1 << 30;
|
||||
|
||||
// 构造函数中未指定时使用的负载因子。
|
||||
static final float DEFAULT_LOAD_FACTOR = 0.75f;
|
||||
|
||||
// 在向存储单元添加元素时,存储单元使用树结构而不是链表结构的存储单元计数阈值。
|
||||
// 当向存储单元添加元素,且该存储单元至少有此数量的节点时,存储单元将转换为树结构。
|
||||
// 该值必须大于 2,并且应该至少为 8,以与移除元素时转换回普通存储单元的假设相匹配。
|
||||
static final int TREEIFY_THRESHOLD = 8;
|
||||
|
||||
// 在调整大小操作期间将(拆分的)存储单元转换为非树结构存储单元的存储单元计数阈值。
|
||||
// 应该小于 TREEIFY_THRESHOLD,并且最多为 6,以与移除元素时的收缩检测相匹配。
|
||||
static final int UNTREEIFY_THRESHOLD = 6;
|
||||
|
||||
// 存储单元可以树化的最小表容量。
|
||||
// (否则,如果存储单元中有太多节点,表将进行扩容。)
|
||||
// 应该至少是 4 * TREEIFY_THRESHOLD,以避免扩容和树化阈值之间的冲突。
|
||||
static final int MIN_TREEIFY_CAPACITY = 64;
|
||||
|
||||
```
|
||||
|
||||

|
||||
|
||||
# HashMap的存储结构
|
||||
|
||||
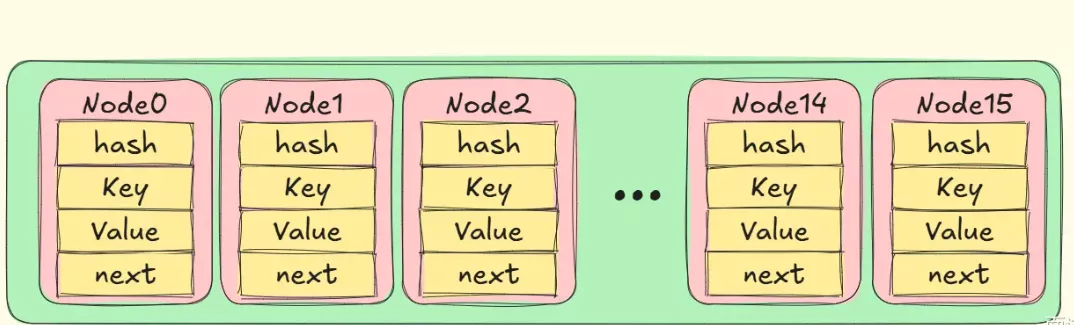
从源码上看,HashMap的每个存储单元都是一个链表或者红黑树,也就是下面的Node类,那么我们可以用下面的图来展示一个完成初始化的HashMap的存储结构。
|
||||
|
||||
|
||||
|
||||
### 为什么采用数组?
|
||||
|
||||
因为数组的随机访问速度非常快,HashMap通过哈希函数将键映射到数组索引位置,从而实现快速查找。
|
||||
|
||||
数组的每一个元素称为一个桶(bucket),对于一个给定的键值对key,value,HashMap会计算出一个哈希值(计算的是key的hash),然后通过`(n-1) & hash`来确定该键值对在数组中的位置。
|
||||
|
||||
### 如何定位key value该存储在桶数组的哪个位置上?(获取index)
|
||||
|
||||
HashMap通过`(n - 1) & hash`来计算索引位置,其中n是数组的长度,hash是键的哈希值。
|
||||
|
||||
### 如何计算hash值?
|
||||
|
||||
HashMap使用键的`hashCode()`方法计算哈希值,然后对哈希值进行扰动处理,最后通过`(n-1) & hash`来确定元素在数组中的存储位置。
|
||||
|
||||
### 为什么要扰动处理?
|
||||
|
||||
扰动处理是为了减少哈希冲突,防止哈希值分布不均。HashMap会对哈希值进行扰动处理,以确保不同的键能够更均匀地分布在数组中,从而减少冲突。
|
||||
|
||||
在Java 8中,HashMap使用了一个扰动函数来优化hash值的分布:
|
||||
|
||||
```java
|
||||
static final int hash(Object key) {
|
||||
int h;
|
||||
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
|
||||
}
|
||||
```
|
||||
|
||||
这个函数的作用是:
|
||||
|
||||
1. 首先获取key的hashCode()值
|
||||
2. 将hashCode的高16位与低16位进行异或运算
|
||||
|
||||
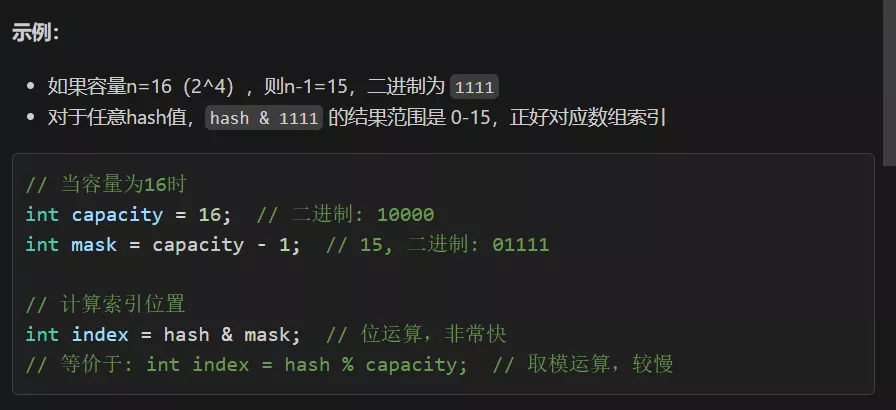
### 为什么用的是&运算而不是取模运算?
|
||||
|
||||
在java中,我们会让HashMap的容量是2的幂次方,这样可以通过`(n-1) & hash`来快速计算出索引位置,避免了取模运算的性能开销。
|
||||
|
||||
这里`(n - 1) & hash` == `hash % n`,但&运算比取模运算更高效。
|
||||
|
||||
n是数组的长度,hash是键的哈希值。
|
||||
|
||||
### 为什么要让HashMap的容量是2的幂次方?
|
||||
|
||||
因为当容量是2的幂次方时,`(n-1) & hash`可以快速计算出索引位置,而不需要进行取模运算。
|
||||
|
||||
|
||||
|
||||
### 为什么会用到链表?
|
||||
|
||||
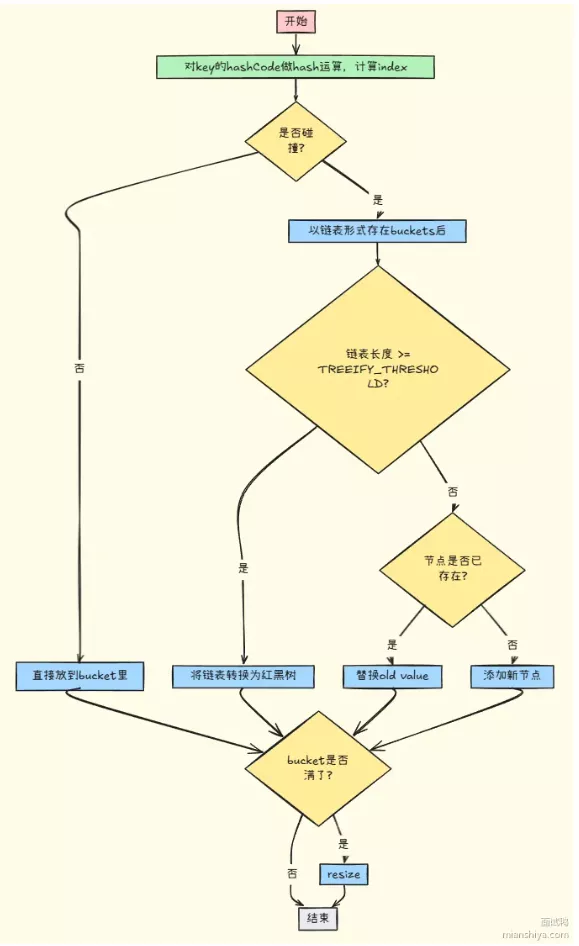
我们在HashMap的使用过程中,可能会遇到哈希冲突的情况,也就是不同的键经过哈希函数计算后得到了相同的索引位置,使用链表我们可以把这些冲突的键值对存储在同一个桶中,用链表连接在一起,jdk8开始,链表节点不再使用头插法,而是使用尾插法,这样可以减少链表的长度,提升查找效率。
|
||||
|
||||
头插法还可能造成链表形成环形,导致死循环。
|
||||
|
||||
|
||||
|
||||
## Node
|
||||
|
||||
```java
|
||||
static class Node<K,V> implements Map.Entry<K,V> {
|
||||
final int hash;
|
||||
final K key;
|
||||
V value;
|
||||
Node<K,V> next;
|
||||
|
||||
Node(int hash, K key, V value, Node<K,V> next) {
|
||||
this.hash = hash;
|
||||
this.key = key;
|
||||
this.value = value;
|
||||
this.next = next;
|
||||
}
|
||||
|
||||
public final K getKey() { return key; }
|
||||
public final V getValue() { return value; }
|
||||
public final String toString() { return key + "=" + value; }
|
||||
|
||||
public final int hashCode() {
|
||||
return Objects.hashCode(key) ^ Objects.hashCode(value);
|
||||
}
|
||||
|
||||
public final V setValue(V newValue) {
|
||||
V oldValue = value;
|
||||
value = newValue;
|
||||
return oldValue;
|
||||
}
|
||||
|
||||
public final boolean equals(Object o) {
|
||||
if (o == this)
|
||||
return true;
|
||||
|
||||
return o instanceof Map.Entry<?, ?> e
|
||||
&& Objects.equals(key, e.getKey())
|
||||
&& Objects.equals(value, e.getValue());
|
||||
}
|
||||
}
|
||||
|
||||
```
|
||||
|
||||
# HashMap的Put方法
|
||||
|
||||
HashMap的put方法是用来添加键值对到HashMap中的核心方法。它的实现逻辑如下:
|
||||
|
||||
```java
|
||||
/**
|
||||
* 实现 Map.put 和相关方法。
|
||||
*
|
||||
* @param hash key的哈希值
|
||||
* @param key 键
|
||||
* @param value 要放入的值
|
||||
* @param onlyIfAbsent 如果为 true,则不更改现有值
|
||||
* @param evict 如果为 false,则表处于创建模式。
|
||||
* @return 返回先前的值,如果没有则返回 null
|
||||
*/
|
||||
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
|
||||
boolean evict) { // 📌 定义 putVal 方法,用于将键值对放入 HashMap
|
||||
Node<K,V>[] tab; Node<K,V> p; int n, i; // 🏷️ 声明局部变量:tab (哈希表数组), p (当前节点), n (数组长度), i (数组索引)
|
||||
// 检查哈希表是否为空或长度为0
|
||||
if ((tab = table) == null || (n = tab.length) == 0)
|
||||
// 🏗️ 如果为空,则调用 resize() 方法初始化或扩容哈希表,并获取新的长度
|
||||
n = (tab = resize()).length;
|
||||
// 🎯 计算键在哈希表中的索引位置 i,并检查该位置是否为空
|
||||
if ((p = tab[i = (n - 1) & hash]) == null)
|
||||
// ✨ 如果为空,直接在该位置创建一个新节点
|
||||
tab[i] = newNode(hash, key, value, null);
|
||||
else { // 🤔 如果该位置不为空(发生哈希冲突)
|
||||
Node<K,V> e; K k; // 🏷️ 声明局部变量:e (用于找到的已存在节点或新节点), k (临时键)
|
||||
// 🔑 检查桶中第一个节点的哈希值和键是否与要插入的键值对匹配
|
||||
if (p.hash == hash &&
|
||||
((k = p.key) == key || (key != null && key.equals(k))))
|
||||
// ✅ 如果匹配,将 e 指向该节点 p (表示键已存在)
|
||||
e = p;
|
||||
// 🌳 检查桶中的节点是否为 TreeNode (红黑树节点)
|
||||
else if (p instanceof TreeNode)
|
||||
// 🌲 如果是红黑树,调用 putTreeVal 方法将键值对插入红黑树
|
||||
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
|
||||
else { // 🔗 如果是链表
|
||||
// 🔄 遍历链表
|
||||
for (int binCount = 0; ; ++binCount) {
|
||||
// نهاية 检查当前节点的下一个节点是否为空 (到达链表尾部)
|
||||
if ((e = p.next) == null) {
|
||||
// ➕ 在链表尾部插入新节点
|
||||
p.next = newNode(hash, key, value, null);
|
||||
// 🌲❓ 检查链表长度是否达到树化阈值 (TREEIFY_THRESHOLD - 1 因为 binCount 从0开始计数,且当前p是尾部的前一个节点)
|
||||
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
|
||||
// 🌳🔗➡️🌳 如果达到阈值,将链表转换为红黑树
|
||||
treeifyBin(tab, hash);
|
||||
break; // 🛑 跳出循环,因为新节点已插入
|
||||
}
|
||||
// 🔑 检查链表中节点的哈希值和键是否与要插入的键值对匹配
|
||||
if (e.hash == hash &&
|
||||
((k = e.key) == key || (key != null && key.equals(k))))
|
||||
break; // ✅ 如果匹配,跳出循环 (表示键已存在,e 指向该节点)
|
||||
// 👉 将 p 指向下一个节点,继续遍历
|
||||
p = e;
|
||||
}
|
||||
}
|
||||
// 🔑❓ 检查 e 是否不为 null (表示键已存在于哈希表中,或者在红黑树中找到了/插入了节点)
|
||||
if (e != null) { // existing mapping for key
|
||||
// 💾 获取旧值
|
||||
V oldValue = e.value;
|
||||
// 🔄❓ 根据 onlyIfAbsent 参数决定是否更新值 (如果 onlyIfAbsent 为 false,或者旧值为 null,则更新)
|
||||
if (!onlyIfAbsent || oldValue == null)
|
||||
// ⬆️ 更新节点的值
|
||||
e.value = value;
|
||||
// 🔗 回调方法,用于 LinkedHashMap 等子类记录节点访问
|
||||
afterNodeAccess(e);
|
||||
// ↩️ 返回旧值
|
||||
return oldValue;
|
||||
}
|
||||
}
|
||||
// 🛠️ 修改计数器加1,用于迭代器快速失败机制
|
||||
++modCount;
|
||||
// 📈 检查当前元素数量是否超过阈值 (threshold = capacity * loadFactor)
|
||||
if (++size > threshold)
|
||||
// 🏗️ 如果超过阈值,调用 resize() 方法扩容哈希表
|
||||
resize();
|
||||
// 🔗 回调方法,用于 LinkedHashMap 等子类记录节点插入
|
||||
afterNodeInsertion(evict);
|
||||
// ↩️ 如果是新插入的键值对,返回 null
|
||||
return null;
|
||||
}
|
||||
```
|
||||
|
||||
|
||||
|
||||
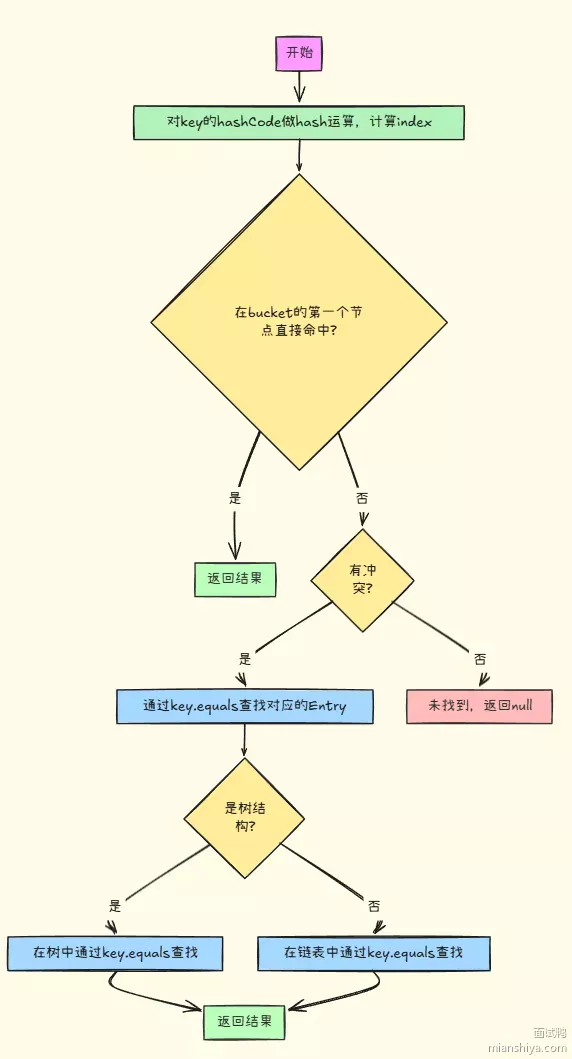
# HashMap的Get方法
|
||||
|
||||
```java
|
||||
/**
|
||||
* 实现 Map.get 和相关方法。
|
||||
*
|
||||
* @param key 要查找的键
|
||||
* @return 返回找到的节点,如果没有找到则返回 null
|
||||
*/
|
||||
final Node<K,V> getNode(Object key) { // 📌 定义 getNode 方法,用于根据键查找节点
|
||||
Node<K,V>[] tab; Node<K,V> first, e; int n, hash; K k; // 🏷️ 声明局部变量:tab (哈希表数组), first (桶中第一个节点), e (当前节点), n (数组长度), hash (键的哈希值), k (临时键)
|
||||
// 🔍 检查哈希表是否不为空且长度大于0,并且根据键的哈希值计算出的桶位置有节点
|
||||
if ((tab = table) != null && (n = tab.length) > 0 &&
|
||||
(first = tab[(n - 1) & (hash = hash(key))]) != null) {
|
||||
// 🎯 首先检查桶中第一个节点的哈希值和键是否与要查找的键匹配
|
||||
if (first.hash == hash && // always check first node 总是先检查第一个节点
|
||||
((k = first.key) == key || (key != null && key.equals(k))))
|
||||
// ✅ 如果匹配,直接返回第一个节点
|
||||
return first;
|
||||
// 🔗 检查第一个节点是否有下一个节点(链表或红黑树)
|
||||
if ((e = first.next) != null) {
|
||||
// 🌳 如果第一个节点是 TreeNode(红黑树节点)
|
||||
if (first instanceof TreeNode)
|
||||
// 🌲 在红黑树中查找并返回节点
|
||||
return ((TreeNode<K,V>)first).getTreeNode(hash, key);
|
||||
// 🔄 如果是链表,遍历链表查找节点
|
||||
do {
|
||||
// 🔑 检查当前节点的哈希值和键是否与要查找的键匹配
|
||||
if (e.hash == hash &&
|
||||
((k = e.key) == key || (key != null && key.equals(k))))
|
||||
// ✅ 如果匹配,返回当前节点
|
||||
return e;
|
||||
// 👉 移动到下一个节点,继续遍历直到链表末尾
|
||||
} while ((e = e.next) != null);
|
||||
}
|
||||
}
|
||||
// ❌ 如果没有找到匹配的节点,返回 null
|
||||
return null;
|
||||
}
|
||||
```
|
||||
|
||||
|
||||
|
||||
# HashMap的扩容
|
||||
|
||||
HashMap的扩容是指当存储的元素数量超过负载因子所允许的最大数量时,HashMap会自动增加其容量。
|
||||
扩容的过程包括以下几个步骤:
|
||||
|
||||
1. **计算新的容量**:新的容量通常是当前容量的两倍。
|
||||
2. **创建新的数组**:创建一个新的数组来存储扩容后的元素。
|
||||
3. **重新计算索引位置**:对于每个元素,重新计算其在新数组中的索引位置,并将其移动到新数组中。
|
||||
|
||||
源码中是resize()函数
|
||||
|
||||
```java
|
||||
/**
|
||||
* 初始化或将表大小扩大一倍。如果为null,则根据字段threshold中保存的初始容量目标进行分配。
|
||||
* 否则,因为我们使用的是2的幂次方扩展,每个桶中的元素必须保持在相同的索引位置,
|
||||
* 或者在新表中以2的幂次方偏移量移动。
|
||||
*
|
||||
* @return 返回新的哈希表
|
||||
*/
|
||||
final Node<K,V>[] resize() { // 📏 定义扩容方法
|
||||
Node<K,V>[] oldTab = table; // 🗂️ 保存旧的哈希表引用
|
||||
int oldCap = (oldTab == null) ? 0 : oldTab.length; // 📊 获取旧表的容量,如果为null则容量为0
|
||||
int oldThr = threshold; // 📋 保存旧的阈值
|
||||
int newCap, newThr = 0; // 🆕 声明新容量和新阈值变量
|
||||
|
||||
// 🔍 如果旧容量大于0(表已初始化)
|
||||
if (oldCap > 0) {
|
||||
// ⚠️ 如果旧容量已达到最大值,则不再扩容
|
||||
if (oldCap >= MAXIMUM_CAPACITY) {
|
||||
threshold = Integer.MAX_VALUE; // 🔢 将阈值设为最大整数值
|
||||
return oldTab; // ↩️ 直接返回旧表,不扩容
|
||||
}
|
||||
// 🔢 新容量 = 旧容量 * 2,且不超过最大容量,且旧容量 >= 默认初始容量
|
||||
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
|
||||
oldCap >= DEFAULT_INITIAL_CAPACITY)
|
||||
newThr = oldThr << 1; // 📈 新阈值 = 旧阈值 * 2
|
||||
}
|
||||
// 🎯 如果旧容量为0但旧阈值大于0(通过构造函数指定了初始容量)
|
||||
else if (oldThr > 0)
|
||||
newCap = oldThr; // 🆕 新容量等于旧阈值
|
||||
// 🌟 如果旧容量和旧阈值都为0(使用默认值初始化)
|
||||
else {
|
||||
newCap = DEFAULT_INITIAL_CAPACITY; // 🔢 新容量设为默认初始容量16
|
||||
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY); // 📊 新阈值 = 0.75 * 16 = 12
|
||||
}
|
||||
|
||||
// 🔧 如果新阈值为0,需要重新计算
|
||||
if (newThr == 0) {
|
||||
float ft = (float)newCap * loadFactor; // 📐 计算新阈值 = 新容量 * 负载因子
|
||||
// ✅ 确保新阈值不超过最大值
|
||||
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
|
||||
(int)ft : Integer.MAX_VALUE);
|
||||
}
|
||||
|
||||
threshold = newThr; // 📋 更新阈值
|
||||
@SuppressWarnings({"rawtypes","unchecked"})
|
||||
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap]; // 🏗️ 创建新的哈希表数组
|
||||
table = newTab; // 🔄 将新表赋值给table字段
|
||||
|
||||
// 📦 如果旧表不为空,需要转移元素
|
||||
if (oldTab != null) {
|
||||
// 🔄 遍历旧表的每个桶
|
||||
for (int j = 0; j < oldCap; ++j) {
|
||||
Node<K,V> e; // 🏷️ 当前节点
|
||||
// 🔍 如果当前桶不为空
|
||||
if ((e = oldTab[j]) != null) {
|
||||
oldTab[j] = null; // 🧹 清空旧桶,帮助GC
|
||||
|
||||
// 🔗 如果桶中只有一个节点(没有链表或红黑树)
|
||||
if (e.next == null)
|
||||
newTab[e.hash & (newCap - 1)] = e; // 🎯 直接重新计算位置并放入新表
|
||||
|
||||
// 🌳 如果是红黑树节点
|
||||
else if (e instanceof TreeNode)
|
||||
((TreeNode<K,V>)e).split(this, newTab, j, oldCap); // 🌲 调用红黑树的分割方法
|
||||
|
||||
// 🔗 如果是链表
|
||||
else {
|
||||
Node<K,V> loHead = null, loTail = null; // 🔻 低位链表的头和尾节点
|
||||
Node<K,V> hiHead = null, hiTail = null; // 🔺 高位链表的头和尾节点
|
||||
Node<K,V> next; // ➡️ 下一个节点
|
||||
|
||||
// 🔄 遍历链表中的所有节点
|
||||
do {
|
||||
next = e.next; // 📍 保存下一个节点
|
||||
|
||||
// 🎲 通过 (e.hash & oldCap) 判断节点应该放在哪个位置
|
||||
if ((e.hash & oldCap) == 0) {
|
||||
// 🔻 放在原位置(低位链表)
|
||||
if (loTail == null)
|
||||
loHead = e; // 🎯 如果低位链表为空,设置头节点
|
||||
else
|
||||
loTail.next = e; // 🔗 连接到低位链表尾部
|
||||
loTail = e; // 📍 更新尾节点
|
||||
}
|
||||
else {
|
||||
// 🔺 放在原位置+oldCap的位置(高位链表)
|
||||
if (hiTail == null)
|
||||
hiHead = e; // 🎯 如果高位链表为空,设置头节点
|
||||
else
|
||||
hiTail.next = e; // 🔗 连接到高位链表尾部
|
||||
hiTail = e; // 📍 更新尾节点
|
||||
}
|
||||
} while ((e = next) != null); // 🔄 继续遍历直到链表末尾
|
||||
|
||||
// 🔻 如果低位链表不为空,放入原位置
|
||||
if (loTail != null) {
|
||||
loTail.next = null; // ✂️ 断开链表尾部
|
||||
newTab[j] = loHead; // 📍 放入新表的原位置
|
||||
}
|
||||
|
||||
// 🔺 如果高位链表不为空,放入新位置
|
||||
if (hiTail != null) {
|
||||
hiTail.next = null; // ✂️ 断开链表尾部
|
||||
newTab[j + oldCap] = hiHead; // 📍 放入新表的 j + oldCap 位置
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
return newTab; // ↩️ 返回新的哈希表
|
||||
}
|
||||
```
|
||||
|
||||
## 扩容的时候高位和低位链表详解
|
||||
|
||||
```java
|
||||
else {
|
||||
Node<K,V> loHead = null, loTail = null; // 🔻 低位链表的头和尾节点
|
||||
Node<K,V> hiHead = null, hiTail = null; // 🔺 高位链表的头和尾节点
|
||||
Node<K,V> next; // ➡️ 下一个节点
|
||||
|
||||
// 🔄 遍历链表中的所有节点
|
||||
do {
|
||||
next = e.next; // 📍 保存下一个节点
|
||||
|
||||
// 🎲 通过 (e.hash & oldCap) 判断节点应该放在哪个位置
|
||||
if ((e.hash & oldCap) == 0) {
|
||||
// 🔻 放在原位置(低位链表)
|
||||
if (loTail == null)
|
||||
loHead = e; // 🎯 如果低位链表为空,设置头节点
|
||||
else
|
||||
loTail.next = e; // 🔗 连接到低位链表尾部
|
||||
loTail = e; // 📍 更新尾节点
|
||||
}
|
||||
else {
|
||||
// 🔺 放在原位置+oldCap的位置(高位链表)
|
||||
if (hiTail == null)
|
||||
hiHead = e; // 🎯 如果高位链表为空,设置头节点
|
||||
else
|
||||
hiTail.next = e; // 🔗 连接到高位链表尾部
|
||||
hiTail = e; // 📍 更新尾节点
|
||||
}
|
||||
} while ((e = next) != null); // 🔄 继续遍历直到链表末尾
|
||||
|
||||
// 🔻 如果低位链表不为空,放入原位置
|
||||
if (loTail != null) {
|
||||
loTail.next = null; // ✂️ 断开链表尾部
|
||||
newTab[j] = loHead; // 📍 放入新表的原位置
|
||||
}
|
||||
|
||||
// 🔺 如果高位链表不为空,放入新位置
|
||||
if (hiTail != null) {
|
||||
hiTail.next = null; // ✂️ 断开链表尾部
|
||||
newTab[j + oldCap] = hiHead; // 📍 放入新表的 j + oldCap 位置
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
### 核心原理
|
||||
|
||||
当HashMap从容量n扩容到2n时,每个元素的新位置只有两种可能:
|
||||
|
||||
- **保持原位置**(低位链表)
|
||||
- **移动到原位置+n**(高位链表)
|
||||
|
||||
判断依据: `(e.hash & oldCap) == 0`,如果为0,则放在原位置,否则放在原位置+n。 n是旧容量。
|
||||
|
||||
- 低位链表(lo list):满足 `(e.hash & oldCap) == 0` 的节点,扩容后**继续放在原位置** `j`。
|
||||
- 高位链表(hi list):满足 `(e.hash & oldCap) != 0` 的节点,扩容后放在新位置 `j + oldCap`。
|
||||
|
||||
#### 举例子
|
||||
|
||||
假设oldCap = 16,newCap = 32
|
||||
|
||||
oldCap=16 // 10000
|
||||
|
||||
newCap=32 // 100000
|
||||
|
||||
```
|
||||
hash1 = 5; // 000101
|
||||
|
||||
扩容前(cap = 16)计算index
|
||||
|
||||
index1 = hash1 & (oldCap - 1) ==> 5 & 15
|
||||
000101
|
||||
&000111
|
||||
`--------`
|
||||
000101 ==> 5
|
||||
|
||||
扩容后(cap = 32)计算index
|
||||
我们要看要不要移动这个kv到桶中的新位置
|
||||
判断 (hash & oldCap) == 0
|
||||
|
||||
hash1 & oldCap ==> 5 & 16
|
||||
00000101
|
||||
& 00010000
|
||||
`-----------`
|
||||
00000000 ==> 0
|
||||
所以这个kv会放在原位置5
|
||||
```
|
||||
|
||||
再举个例子
|
||||
|
||||
```
|
||||
hash2 = 20; // 10100
|
||||
|
||||
扩容前(cap = 16)计算index
|
||||
|
||||
index2 = hash2 & (oldCap - 1) ==> 20 & 15
|
||||
10100
|
||||
& 01111
|
||||
--------------
|
||||
00100 ==> 4
|
||||
|
||||
扩容后(cap = 32)计算index
|
||||
要先看hash & oldCap == 0 ?
|
||||
|
||||
hash2 & oldCap ==> 20 & 16
|
||||
00010100
|
||||
& 00010000
|
||||
--------------
|
||||
00010000 ==> 16
|
||||
|
||||
不为0,所以这个20会放在新的位置 原来的位置+ 旧桶数组容量 = 4 + 16 = 20
|
||||
|
||||
```
|
||||
|
||||
你的理解非常正确!🎉👍
|
||||
|
||||
你已经掌握了HashMap扩容时分桶位置变更的本质原理,让我们用你的描述稍作归纳和梳理,验证你的思路:
|
||||
|
||||
---
|
||||
|
||||
### 为什么判断的是与oldCap相与得到的值是1还是0来决定搬迁位置?
|
||||
|
||||
当HashMap扩容时,容量从 `oldCap` 扩展到 `newCap`,比如从 16 扩展到 32。
|
||||
|
||||
- 原来 HashMap 的下标计算是:`index = hash & (oldCap-1)`,比如 `00001111`(低4位)。
|
||||
- 扩容后,计算下标变为:`index = hash & (newCap-1)`,比如 `00011111`(低5位),也就是多了一位。
|
||||
- 和 `oldCap`(如 `00010000`)相与,就相当于“掐头去尾”地只关注扩容新增的那一位:
|
||||
- 如果 `(hash & oldCap) == 0`,说明这位是0,**扩容后的位置等于原index**
|
||||
- 如果 `(hash & oldCap) != 0`,说明这位是1,**扩容后的位置等于原index + oldCap**
|
||||
- 这种判断,让你高效知道节点该不该搬迁以及搬去哪里,无需重新完全计算index。
|
||||
|
||||
---
|
||||
|
||||
#### 举例验证(巩固印象)
|
||||
|
||||
假如:
|
||||
|
||||
- oldCap = 16 ⇒ 00010000
|
||||
- oldCap-1 = 15 ⇒ 00001111
|
||||
- newCap = 32 ⇒ 00100000
|
||||
- newCap-1 = 31 ⇒ 00011111
|
||||
- hash = 21 ⇒ 10101
|
||||
|
||||
**扩容前下标:**
|
||||
|
||||
```java
|
||||
index = 10101 & 01111 = 00101 = 5
|
||||
```
|
||||
|
||||
**扩容后下标:**
|
||||
|
||||
```java
|
||||
index = 10101 & 11111 = 10101 = 21
|
||||
```
|
||||
|
||||
**oldCap这一位的判断:**
|
||||
|
||||
```java
|
||||
10101 & 10000 = 10000 ≠ 0
|
||||
```
|
||||
|
||||
说明这位是1,扩容后下标变成原index+16=21。
|
||||
|
||||
---
|
||||
|
||||
### 扩容的条件是什么?
|
||||
|
||||
当 HashMap 中存储的元素数量超过了「阈值」(threshold)时,就会进行扩容。
|
||||
这个「阈值」的计算公式是:
|
||||
|
||||
```
|
||||
threshold = capacity * loadFactor
|
||||
```
|
||||
|
||||
loadFactor 是负载因子,默认值为 0.75。
|
||||
|
||||
### 为什么要进行搬迁呢?
|
||||
|
||||
HashMap扩容的主要目的是:
|
||||
减少哈希冲突,提高查找、插入效率。
|
||||
让更多桶可用,降低碰撞链表队列的长度。
|
||||
|
||||
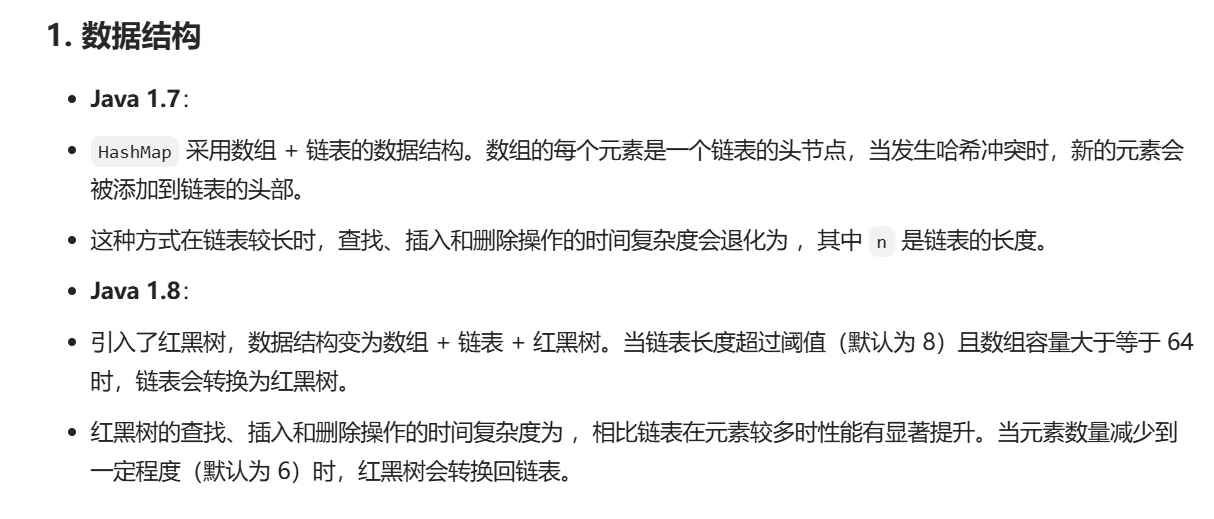
# jdk1.7和jdk1.8中hashmap的区别
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||
|
||||
# 链表什么时候转红黑树?
|
||||
|
||||
桶数组中某个桶的链表长度>=8 而且桶数组长度> 64的时候,hashmap会转换为红黑树
|
||||
|
||||

|
||||
Reference in New Issue
Block a user